Escornabot
This project's final goal is for children with visual impairment or blindness to use the Escornabot and therefore use educational robotics.
Components and supplies
Panasonic NCR18650B rechargeable Li-Ion batteries (3400 mAh, 3.7V)
MIFARE Classic® 1K cards - 13.56MHz
Adafruit Mono 2.5W Class D Audio Amplifier
RFID-RC522 13.56Mhz
DFPlayer Mini MP3 Player
Plate 3x6
Beam 0824 176mm
HC-06 Bluetooth Module
Adafruit 1.44 "Color TFT LCD Display with MicroSD - ST7735R
Resistor 1k ohm
Plate 7x9 B
HC-05 Bluetooth Module
Escornabot Robot (DIY version)
Speaker: 3W, 4 ohms
Resistor 5,6K ohm
12 LEDs RGB WS2812B 5050 Ring
Arduino Nano R3
Resistor 10k ohm
Project description
Code
Github






Github
Downloadable files
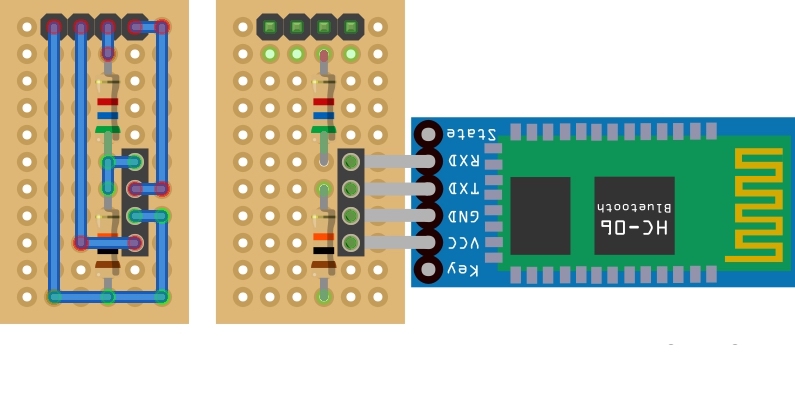
escornabot_placa_bt_02_ftz_7XQG0Xk2Zd.jpg
escornabot_placa_bt_02_ftz_7XQG0Xk2Zd.jpg

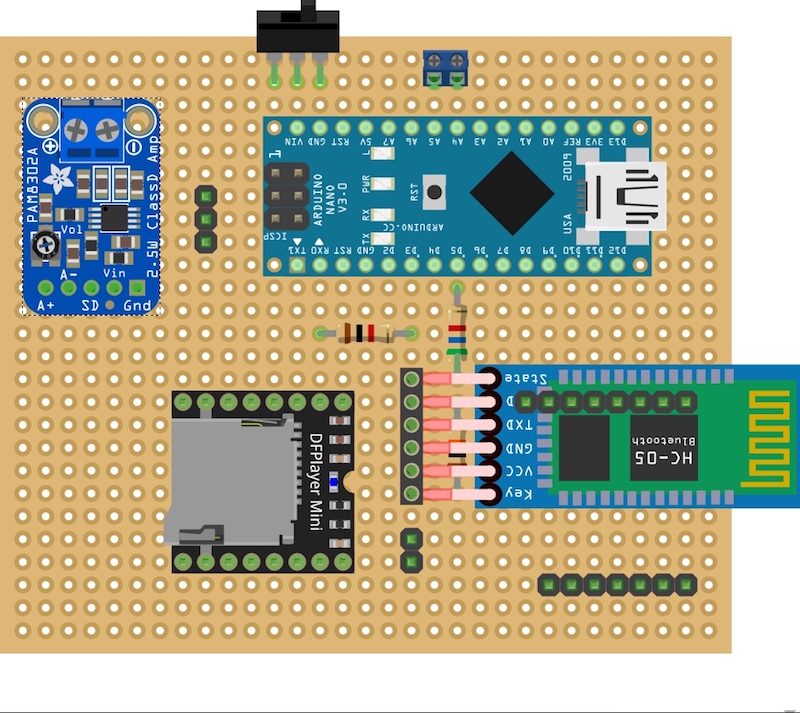
placa_pcb_03_ftz_BDhJm6I3fa.jpg
placa_pcb_03_ftz_BDhJm6I3fa.jpg
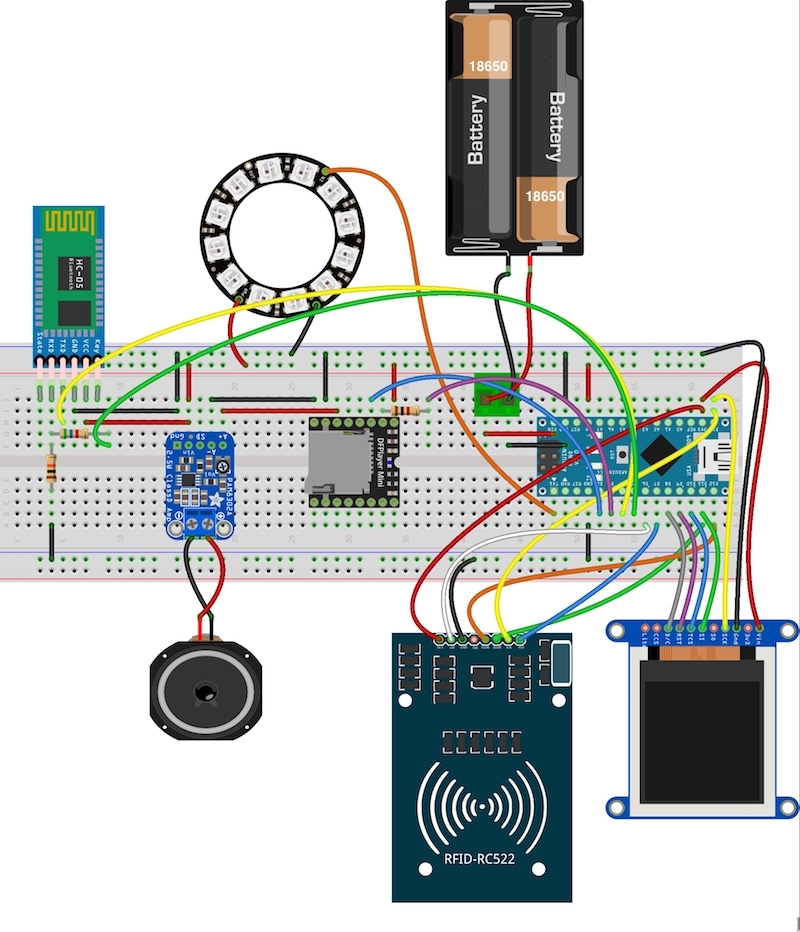
protoboard_02_ftz_c2QrTp3QOX.jpg
protoboard_02_ftz_c2QrTp3QOX.jpg
escornabot_placa_bt_01_ftz_c2EdLdckaX.jpg
escornabot_placa_bt_01_ftz_c2EdLdckaX.jpg
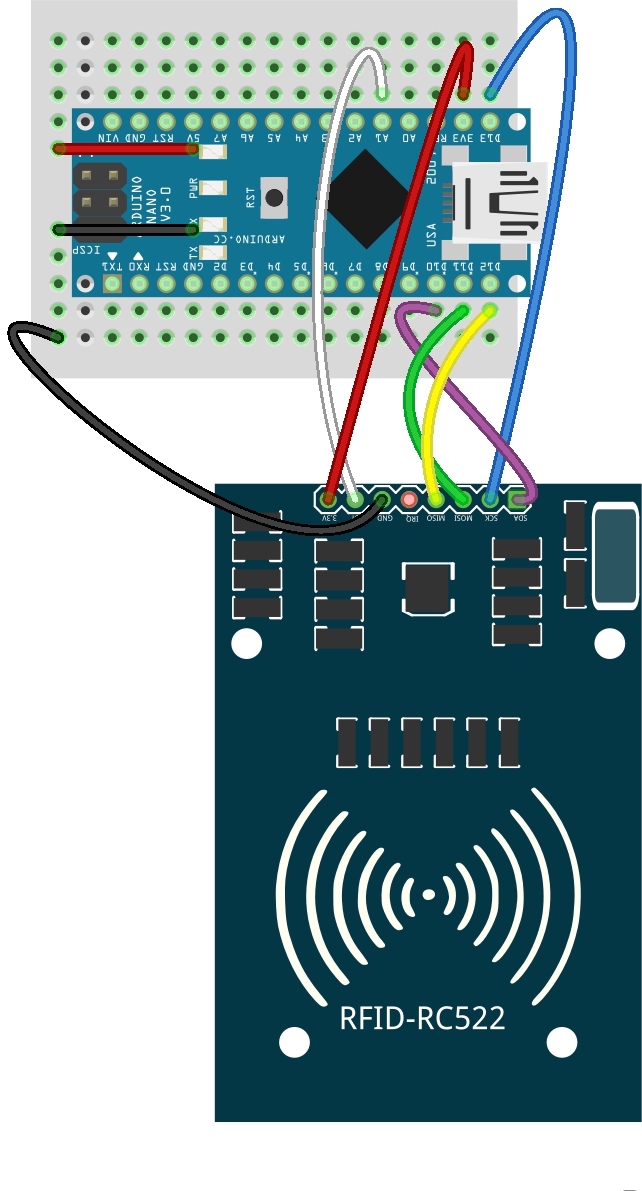
escornabot_rfid_ftz_z8SRSfP6GB.jpg
escornabot_rfid_ftz_z8SRSfP6GB.jpg
placa_pcb_04_ftz_o99keVIuiQ.jpg
placa_pcb_04_ftz_o99keVIuiQ.jpg

placa_pcb_02_ftz_sEfS3QtZxH.jpg
placa_pcb_02_ftz_sEfS3QtZxH.jpg

protoboard_01_ftz_Xm7zer35Yn.jpg
protoboard_01_ftz_Xm7zer35Yn.jpg

placa_pcb_04_ftz_o99keVIuiQ.jpg
placa_pcb_04_ftz_o99keVIuiQ.jpg
placa_pcb_03_ftz_BDhJm6I3fa.jpg
placa_pcb_03_ftz_BDhJm6I3fa.jpg
protoboard_02_ftz_c2QrTp3QOX.jpg
protoboard_02_ftz_c2QrTp3QOX.jpg
escornabot_placa_bt_01_ftz_c2EdLdckaX.jpg
escornabot_placa_bt_01_ftz_c2EdLdckaX.jpg
escornabot_rfid_ftz_z8SRSfP6GB.jpg
escornabot_rfid_ftz_z8SRSfP6GB.jpg
escornabot_placa_bt_02_ftz_7XQG0Xk2Zd.jpg
escornabot_placa_bt_02_ftz_7XQG0Xk2Zd.jpg
placa_pcb_02_ftz_sEfS3QtZxH.jpg
placa_pcb_02_ftz_sEfS3QtZxH.jpg
Comments
Only logged in users can leave comments
Avilmaru
0 Followers
•0 Projects
Table of contents
Intro
6
0