Renewing the Nikko Turbo 2 RC Car
Vintage 1980s Nikko remote control RC car mascot.
Components and supplies
5 mm LED: Red
Arduino Nano R3
5 mm LED: Green
HC-06 Bluetooth Module
Dual H-Bridge motor drivers L298
Buzzer, Piezo
Resistor 221 ohm
Tools and machines
Soldering iron (generic)
Solder Flux, Soldering
Hot glue gun (generic)
Drill / Driver, Cordless
Apps and platforms
Arduino IDE
Project description
Code
Arduino code for the NIKKO Turbo II RC Car
arduino
Engine 2 is the Magnetic steering system used in NIKKO. If another type is needed, the necessary changes must be made.
1//including the libraries 2#include <SoftwareSerial.h> // TX RX software library for bluetooth 3 4//Defining pins for RGB led 5#define GREEN 12 6#define RED 11 7#define delayTime 3 8 9//Initializing pins for bluetooth Module 10int bluetoothTx = 8; // bluetooth tx to 2 pin 11int bluetoothRx = 7; // bluetooth rx to 3 pin 12SoftwareSerial bluetooth(bluetoothTx, bluetoothRx); 13//Front Motor Pins 14int Enable1 = 3; 15int Motor1_Pin1 = 2; 16int Motor1_Pin2 = 4; 17//Back Motor Pins 18int Motor2_Pin1 = 5; 19int Motor2_Pin2 = 9; 20int Enable2 = 10; 21//Front Light pins 22int front_light1 = GREEN; 23//Back light pins 24int back_light1 = RED; 25int horn = 6; 26char command ; //variable to store the data 27int velocity = 0; //Variable to control the speed of motor 28void setup() 29{ 30 //Set the baud rate of serial communication and bluetooth module at same rate. 31 Serial.begin(9600); 32 bluetooth.begin(9600); 33 //Setting the L298N, LED and RGB LED pins as output pins. 34 pinMode(Motor1_Pin1, OUTPUT); 35 pinMode(Motor1_Pin2, OUTPUT); 36 pinMode(Enable1, OUTPUT); 37 pinMode(Motor2_Pin1, OUTPUT); 38 pinMode(Motor2_Pin2, OUTPUT); 39 pinMode(Enable2, OUTPUT); 40 pinMode(front_light1, OUTPUT); 41 pinMode(back_light1, OUTPUT); 42 pinMode(horn, OUTPUT); 43 pinMode(GREEN, OUTPUT); 44 pinMode(RED, OUTPUT); 45 //Setting the enable and LED pins as HIGH. 46 digitalWrite(GREEN, HIGH); 47 digitalWrite(RED, HIGH); 48 digitalWrite(Enable2, HIGH); 49 digitalWrite(back_light1, LOW); 50 digitalWrite(front_light1, LOW); 51} 52void loop(){ 53 if(bluetooth.available() > 0){ //Checking if there is some data available or not 54 command = bluetooth.read(); //Storing the data in the 'command' variable 55 Serial.println(command); //Printing it on the serial monitor 56 57 //Change pin mode only if new command is different from previous. 58 switch(command){ 59 case 'F': //Moving the Car Forward 60 digitalWrite(Motor1_Pin1, LOW); 61 digitalWrite(Motor1_Pin2, HIGH); 62 digitalWrite(Motor2_Pin1, LOW); 63 digitalWrite(Motor2_Pin2, LOW); 64 break; 65 case 'L': //Moving the Car Forward Left90 66 digitalWrite(Motor1_Pin1, LOW); 67 digitalWrite(Motor1_Pin2, HIGH); 68 digitalWrite(Motor2_Pin1, LOW); 69 digitalWrite(Motor2_Pin2, HIGH); 70 delay (30); 71 digitalWrite(Motor2_Pin1, LOW); 72 digitalWrite(Motor2_Pin2, LOW); 73 break; 74 case 'G': //Moving the Car Forward Left45 75 digitalWrite(Motor1_Pin1, LOW); 76 digitalWrite(Motor1_Pin2, HIGH); 77 digitalWrite(Motor2_Pin1, LOW); 78 digitalWrite(Motor2_Pin2, HIGH); 79 delay (30); 80 digitalWrite(Motor2_Pin1, LOW); 81 digitalWrite(Motor2_Pin2, LOW); 82 break; 83 case 'R': //Moving the Car Forward Right90 84 digitalWrite(Motor1_Pin1, LOW); 85 digitalWrite(Motor1_Pin2, HIGH); 86 digitalWrite(Motor2_Pin1, HIGH); 87 digitalWrite(Motor2_Pin2, LOW); 88 delay (30); 89 digitalWrite(Motor2_Pin1, LOW); 90 digitalWrite(Motor2_Pin2, LOW); 91 break; 92 case 'I': //Moving the Car Forward Right45 93 digitalWrite(Motor1_Pin1, LOW); 94 digitalWrite(Motor1_Pin2, HIGH); 95 digitalWrite(Motor2_Pin1, HIGH); 96 digitalWrite(Motor2_Pin2, LOW); 97 delay (30); 98 digitalWrite(Motor2_Pin1, LOW); 99 digitalWrite(Motor2_Pin2, LOW); 100 break; 101 case 'S': //Stop 102 digitalWrite(Motor1_Pin2, LOW); 103 digitalWrite(Motor1_Pin1, LOW); 104 digitalWrite(Motor2_Pin2, LOW); 105 digitalWrite(Motor2_Pin1, LOW); 106 break; 107 case 'B': //Moving the Car Backward 108 digitalWrite(Motor1_Pin1, HIGH); 109 digitalWrite(Motor1_Pin2, LOW); 110 break; 111 case 'J': //Moving the Car backward Right90 112 digitalWrite(Motor1_Pin2, LOW); 113 digitalWrite(Motor1_Pin1, HIGH); 114 digitalWrite(Motor2_Pin1, HIGH); 115 digitalWrite(Motor2_Pin2, LOW); 116 delay (30); 117 digitalWrite(Motor2_Pin1, LOW); 118 digitalWrite(Motor2_Pin2, LOW); 119 break; 120 case 'H': //Moving the Car backward Left90 121 digitalWrite(Motor1_Pin1, HIGH); 122 digitalWrite(Motor1_Pin2, LOW); 123 digitalWrite(Motor2_Pin1, LOW); 124 digitalWrite(Motor2_Pin2, HIGH); 125 delay (30); 126 digitalWrite(Motor2_Pin1, LOW); 127 digitalWrite(Motor2_Pin2, LOW); 128 break; 129 case 'W': //Front light ON 130 digitalWrite(front_light1, HIGH); 131 break; 132 case 'w': //Front light OFF 133 digitalWrite(front_light1, LOW); 134 break; 135 case 'U': //Back light ON 136 digitalWrite(back_light1, HIGH); 137 break; 138 case 'u': //Back light OFF 139 digitalWrite(back_light1, LOW); 140 break; 141 case 'V': //Horn On 142{ 143 int i = 200; // The starting pitch 144 while(i < 800) { 145 i++; 146 tone(horn, i); // Emit the noise 147 delay(5); 148 } 149 delay(100); // A short break in between each whoop 150} 151 break; 152 case 'v': //Horn OFF 153 noTone(horn); 154 break; 155 case 'x': //Turn ON Everything 156 break; 157 case 'X': //Turn OFF Everything 158 break; 159 160 //Controlling the Speed of Car 161default: //Get velocity 162 if(command=='q'){ 163 velocity = 255; //Full velocity 164 analogWrite(Enable1, velocity); 165 } 166 else{ 167 //Chars '0' - '9' have an integer equivalence of 48 - 57, accordingly. 168 if((command >= 48) && (command <= 57)){ 169 //Subtracting 48 changes the range from 48-57 to 0-9. 170 //Multiplying by 25 changes the range from 0-9 to 0-225. 171 velocity = (command - 48)*25; 172 analogWrite(Enable1, velocity); 173 } 174 } 175 } 176 } 177} 178
Arduino code for the NIKKO Turbo II RC Car
arduino
Engine 2 is the Magnetic steering system used in NIKKO. If another type is needed, the necessary changes must be made.
1//including the libraries 2#include <SoftwareSerial.h> // TX RX software library for bluetooth 3 4//Defining pins for RGB led 5#define GREEN 12 6#define RED 11 7#define delayTime 3 8 9//Initializing pins for bluetooth Module 10int bluetoothTx = 8; // bluetooth tx to 2 pin 11int bluetoothRx = 7; // bluetooth rx to 3 pin 12SoftwareSerial bluetooth(bluetoothTx, bluetoothRx); 13//Front Motor Pins 14int Enable1 = 3; 15int Motor1_Pin1 = 2; 16int Motor1_Pin2 = 4; 17//Back Motor Pins 18int Motor2_Pin1 = 5; 19int Motor2_Pin2 = 9; 20int Enable2 = 10; 21//Front Light pins 22int front_light1 = GREEN; 23//Back light pins 24int back_light1 = RED; 25int horn = 6; 26char command ; //variable to store the data 27int velocity = 0; //Variable to control the speed of motor 28void setup() 29{ 30 //Set the baud rate of serial communication and bluetooth module at same rate. 31 Serial.begin(9600); 32 bluetooth.begin(9600); 33 //Setting the L298N, LED and RGB LED pins as output pins. 34 pinMode(Motor1_Pin1, OUTPUT); 35 pinMode(Motor1_Pin2, OUTPUT); 36 pinMode(Enable1, OUTPUT); 37 pinMode(Motor2_Pin1, OUTPUT); 38 pinMode(Motor2_Pin2, OUTPUT); 39 pinMode(Enable2, OUTPUT); 40 pinMode(front_light1, OUTPUT); 41 pinMode(back_light1, OUTPUT); 42 pinMode(horn, OUTPUT); 43 pinMode(GREEN, OUTPUT); 44 pinMode(RED, OUTPUT); 45 //Setting the enable and LED pins as HIGH. 46 digitalWrite(GREEN, HIGH); 47 digitalWrite(RED, HIGH); 48 digitalWrite(Enable2, HIGH); 49 digitalWrite(back_light1, LOW); 50 digitalWrite(front_light1, LOW); 51} 52void loop(){ 53 if(bluetooth.available() > 0){ //Checking if there is some data available or not 54 command = bluetooth.read(); //Storing the data in the 'command' variable 55 Serial.println(command); //Printing it on the serial monitor 56 57 //Change pin mode only if new command is different from previous. 58 switch(command){ 59 case 'F': //Moving the Car Forward 60 digitalWrite(Motor1_Pin1, LOW); 61 digitalWrite(Motor1_Pin2, HIGH); 62 digitalWrite(Motor2_Pin1, LOW); 63 digitalWrite(Motor2_Pin2, LOW); 64 break; 65 case 'L': //Moving the Car Forward Left90 66 digitalWrite(Motor1_Pin1, LOW); 67 digitalWrite(Motor1_Pin2, HIGH); 68 digitalWrite(Motor2_Pin1, LOW); 69 digitalWrite(Motor2_Pin2, HIGH); 70 delay (30); 71 digitalWrite(Motor2_Pin1, LOW); 72 digitalWrite(Motor2_Pin2, LOW); 73 break; 74 case 'G': //Moving the Car Forward Left45 75 digitalWrite(Motor1_Pin1, LOW); 76 digitalWrite(Motor1_Pin2, HIGH); 77 digitalWrite(Motor2_Pin1, LOW); 78 digitalWrite(Motor2_Pin2, HIGH); 79 delay (30); 80 digitalWrite(Motor2_Pin1, LOW); 81 digitalWrite(Motor2_Pin2, LOW); 82 break; 83 case 'R': //Moving the Car Forward Right90 84 digitalWrite(Motor1_Pin1, LOW); 85 digitalWrite(Motor1_Pin2, HIGH); 86 digitalWrite(Motor2_Pin1, HIGH); 87 digitalWrite(Motor2_Pin2, LOW); 88 delay (30); 89 digitalWrite(Motor2_Pin1, LOW); 90 digitalWrite(Motor2_Pin2, LOW); 91 break; 92 case 'I': //Moving the Car Forward Right45 93 digitalWrite(Motor1_Pin1, LOW); 94 digitalWrite(Motor1_Pin2, HIGH); 95 digitalWrite(Motor2_Pin1, HIGH); 96 digitalWrite(Motor2_Pin2, LOW); 97 delay (30); 98 digitalWrite(Motor2_Pin1, LOW); 99 digitalWrite(Motor2_Pin2, LOW); 100 break; 101 case 'S': //Stop 102 digitalWrite(Motor1_Pin2, LOW); 103 digitalWrite(Motor1_Pin1, LOW); 104 digitalWrite(Motor2_Pin2, LOW); 105 digitalWrite(Motor2_Pin1, LOW); 106 break; 107 case 'B': //Moving the Car Backward 108 digitalWrite(Motor1_Pin1, HIGH); 109 digitalWrite(Motor1_Pin2, LOW); 110 break; 111 case 'J': //Moving the Car backward Right90 112 digitalWrite(Motor1_Pin2, LOW); 113 digitalWrite(Motor1_Pin1, HIGH); 114 digitalWrite(Motor2_Pin1, HIGH); 115 digitalWrite(Motor2_Pin2, LOW); 116 delay (30); 117 digitalWrite(Motor2_Pin1, LOW); 118 digitalWrite(Motor2_Pin2, LOW); 119 break; 120 case 'H': //Moving the Car backward Left90 121 digitalWrite(Motor1_Pin1, HIGH); 122 digitalWrite(Motor1_Pin2, LOW); 123 digitalWrite(Motor2_Pin1, LOW); 124 digitalWrite(Motor2_Pin2, HIGH); 125 delay (30); 126 digitalWrite(Motor2_Pin1, LOW); 127 digitalWrite(Motor2_Pin2, LOW); 128 break; 129 case 'W': //Front light ON 130 digitalWrite(front_light1, HIGH); 131 break; 132 case 'w': //Front light OFF 133 digitalWrite(front_light1, LOW); 134 break; 135 case 'U': //Back light ON 136 digitalWrite(back_light1, HIGH); 137 break; 138 case 'u': //Back light OFF 139 digitalWrite(back_light1, LOW); 140 break; 141 case 'V': //Horn On 142{ 143 int i = 200; // The starting pitch 144 while(i < 800) { 145 i++; 146 tone(horn, i); // Emit the noise 147 delay(5); 148 } 149 delay(100); // A short break in between each whoop 150} 151 break; 152 case 'v': //Horn OFF 153 noTone(horn); 154 break; 155 case 'x': //Turn ON Everything 156 break; 157 case 'X': //Turn OFF Everything 158 break; 159 160 //Controlling the Speed of Car 161default: //Get velocity 162 if(command=='q'){ 163 velocity = 255; //Full velocity 164 analogWrite(Enable1, velocity); 165 } 166 else{ 167 //Chars '0' - '9' have an integer equivalence of 48 - 57, accordingly. 168 if((command >= 48) && (command <= 57)){ 169 //Subtracting 48 changes the range from 48-57 to 0-9. 170 //Multiplying by 25 changes the range from 0-9 to 0-225. 171 velocity = (command - 48)*25; 172 analogWrite(Enable1, velocity); 173 } 174 } 175 } 176 } 177} 178
Downloadable files
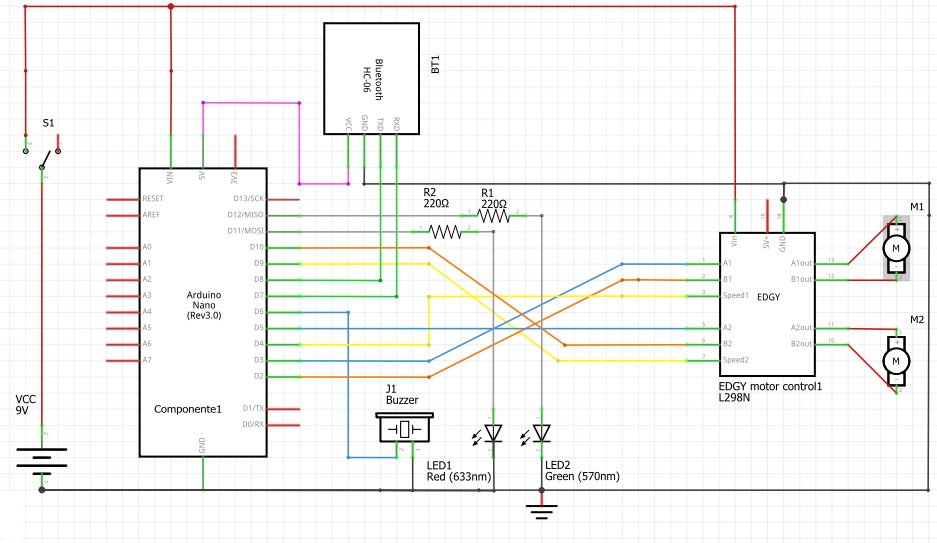
Wiring diagram for Nikko Turbo II RC Car
Engine 2 is the steering system, Battery are used by Nikko.
Wiring diagram for Nikko Turbo II RC Car
Documentation
Protoboard for Nikko Turbo II RC Car
The components are approximated from the actual ones used.
Protoboard for Nikko Turbo II RC Car
Protoboard for Nikko Turbo II RC Car
The components are approximated from the actual ones used.
Protoboard for Nikko Turbo II RC Car
Comments
Only logged in users can leave comments
MarcoGPS
0 Followers
•0 Projects
Table of contents
Intro
5
0