El Toro Grande: Self-Driving Car Using Machine Learning
ETG is an autonomous RC car that utilizes a RPi 3 and Arduino to localize itself in the environment and avoid colliding into other bots.
Components and supplies
1
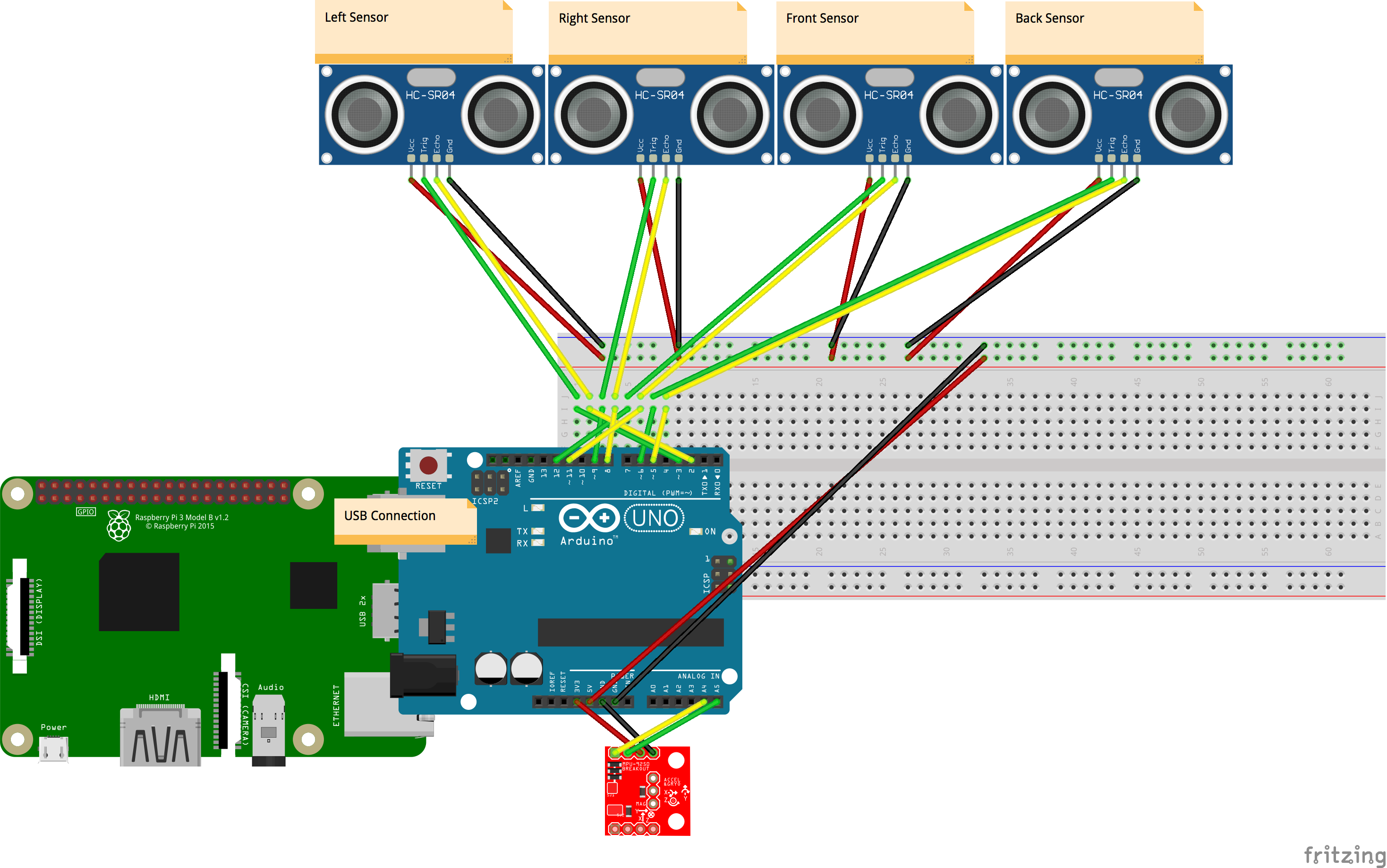
Arduino UNO
1
PCA9685
4
Ultrasonic Sensor - HC-SR04 (Generic)
1
Raspberry Pi 3 Model B
1
SparkFun IMU Breakout - MPU-9250
Tools and machines
1
3D Printer (generic)
Project description
Code
Arduino Sensor Polling
arduino
1#include <Wire.h> 2#include <TimerOne.h> 3#define tpLEFT 3 4#define epLEFT 2 5#define tpBACK 6 6#define epBACK 5 7#define tpRIGHT 9 8#define epRIGHT 8 9#define tpFRONT 12 10#define epFRONT 11 11 12void I2Cread(uint8_t Address, uint8_t Register, uint8_t Nbytes, uint8_t* Data) 13{ 14 Wire.beginTransmission(Address); 15 Wire.write(Register); 16 Wire.endTransmission(); 17 Wire.requestFrom(Address, Nbytes); 18 uint8_t index = 0; 19 while (Wire.available()) 20 Data[index++] = Wire.read(); 21} 22void I2CwriteByte(uint8_t Address, uint8_t Register, uint8_t Data) 23{ 24 Wire.beginTransmission(Address); 25 Wire.write(Register); 26 Wire.write(Data); 27 Wire.endTransmission(); 28} 29long int ti; 30volatile bool intFlag = false; 31void setup() 32{ 33 delay(100); 34 pinMode(LED_BUILTIN, OUTPUT); 35 Wire.begin(); 36 Serial.begin(115200); 37 38 I2CwriteByte(0x68, 29, 0x06); 39 I2CwriteByte(0x68, 26, 0x06); 40 I2CwriteByte(0x68, 27, 0x10); 41 I2CwriteByte(0x68, 28, 0x08); 42 I2CwriteByte(0x68, 0x37, 0x02); 43 I2CwriteByte(0x0C, 0x0A, 0x16); 44 45 pinMode(13, OUTPUT); 46 Timer1.initialize(10000); 47 Timer1.attachInterrupt(callback); 48 49 ti = millis(); 50 51 pinMode(tpLEFT, OUTPUT); 52 pinMode(epLEFT, INPUT); 53 pinMode(tpBACK, OUTPUT); 54 pinMode(epBACK, INPUT); 55 pinMode(tpRIGHT, OUTPUT); 56 pinMode(epRIGHT, INPUT); 57 pinMode(tpFRONT, OUTPUT); 58 pinMode(epFRONT, INPUT); 59// delay(100); 60} 61 62long int cpt = 0; 63 64void callback() 65{ 66 intFlag = true; 67 digitalWrite(13, digitalRead(13) ^ 1); 68} 69int count = 0; 70 71 72int ringRing; 73 74 75 76void loop() 77{ 78// while(millis()<10000) 79// { 80// count++; 81 82// ringRing = ' '; 83// if(Serial.available() > 0) { 84// ringRing = Serial.read(); 85// Serial.print("RINGRING: "+ringRing); 86// } 87// if(ringRing == 122) { 88// readData(); 89// } 90 91readData(); 92 93 94 95//} 96//Serial.print("COUNT: "); 97//Serial.print(count); 98} 99 100void readData() 101{ 102 103 delay(20); 104 int left = getDistance(tpLEFT, epLEFT); 105 int right = getDistance(tpRIGHT, epRIGHT); 106 int front = getDistance(tpFRONT, epFRONT); 107 int back = getDistance(tpBACK, epBACK); 108 int threshold = 50; 109 Serial.print(" st "); 110 if (left < threshold && left != 0) 111 { 112 Serial.print(" left "); 113 } 114 if (right < threshold && right != 0) 115 { 116 Serial.print(" right "); 117 } 118 if (front < 10 && front != 0) 119 { 120 Serial.print(" front "); 121 } 122 if (back < threshold && back != 0) 123 { 124 Serial.print(" back "); 125 } 126 Serial.print("et "); 127 128 while (!intFlag); 129 intFlag = false; 130 uint8_t Buf[14]; 131 I2Cread(0x68, 0x3B, 14, Buf); 132 //acc 133 int16_t ax = -(Buf[0] << 8 | Buf[1]); 134 int16_t ay = -(Buf[2] << 8 | Buf[3]); 135 int16_t az = Buf[4] << 8 | Buf[5]; 136 // gyr 137 int16_t gx = -(Buf[8] << 8 | Buf[9]); 138 int16_t gy = -(Buf[10] << 8 | Buf[11]); 139 int16_t gz = Buf[12] << 8 | Buf[13]; 140 // acc 141 Serial.print(ax, DEC); 142 Serial.print(" "); 143 Serial.print(ay, DEC); 144 Serial.print(" "); 145 Serial.print(az, DEC); 146 Serial.print(" ea "); 147 148 // gyr 149 Serial.print(gx, DEC); 150 Serial.print(" "); 151 152 Serial.print(gy, DEC); 153 Serial.print(" "); 154 155 Serial.print(gz, DEC); 156 Serial.print(" END"); 157 158 uint8_t ST1; 159 do 160 { 161 I2Cread(0x0C, 0x02, 1, &ST1); 162 } 163 while (!(ST1 & 0x01)); 164 Serial.println(); 165} 166int getDistance(int trigPin, int echoPin) 167{ 168 long duration, distance; 169 digitalWrite(trigPin, HIGH); 170 delayMicroseconds(10); 171 digitalWrite(trigPin, LOW); 172 173 duration = pulseIn(echoPin, HIGH, 20000); 174 if (duration == 0) 175 { 176 pinMode(echoPin, OUTPUT); 177 digitalWrite(echoPin, LOW); 178 delayMicroseconds(200); 179 pinMode(echoPin, INPUT); 180 } 181 distance = (duration / 2) / 29.1; 182 return distance; 183} 184 185 186
Arduino Sensor Polling
arduino
1#include <Wire.h> 2#include <TimerOne.h> 3#define tpLEFT 3 4#define epLEFT 2 5#define tpBACK 6 6#define epBACK 5 7#define tpRIGHT 9 8#define epRIGHT 8 9#define tpFRONT 12 10#define epFRONT 11 11 12void I2Cread(uint8_t Address, uint8_t Register, uint8_t Nbytes, uint8_t* Data) 13{ 14 Wire.beginTransmission(Address); 15 Wire.write(Register); 16 Wire.endTransmission(); 17 Wire.requestFrom(Address, Nbytes); 18 uint8_t index = 0; 19 while (Wire.available()) 20 Data[index++] = Wire.read(); 21} 22void I2CwriteByte(uint8_t Address, uint8_t Register, uint8_t Data) 23{ 24 Wire.beginTransmission(Address); 25 Wire.write(Register); 26 Wire.write(Data); 27 Wire.endTransmission(); 28} 29long int ti; 30volatile bool intFlag = false; 31void setup() 32{ 33 delay(100); 34 pinMode(LED_BUILTIN, OUTPUT); 35 Wire.begin(); 36 Serial.begin(115200); 37 38 I2CwriteByte(0x68, 29, 0x06); 39 I2CwriteByte(0x68, 26, 0x06); 40 I2CwriteByte(0x68, 27, 0x10); 41 I2CwriteByte(0x68, 28, 0x08); 42 I2CwriteByte(0x68, 0x37, 0x02); 43 I2CwriteByte(0x0C, 0x0A, 0x16); 44 45 pinMode(13, OUTPUT); 46 Timer1.initialize(10000); 47 Timer1.attachInterrupt(callback); 48 49 ti = millis(); 50 51 pinMode(tpLEFT, OUTPUT); 52 pinMode(epLEFT, INPUT); 53 pinMode(tpBACK, OUTPUT); 54 pinMode(epBACK, INPUT); 55 pinMode(tpRIGHT, OUTPUT); 56 pinMode(epRIGHT, INPUT); 57 pinMode(tpFRONT, OUTPUT); 58 pinMode(epFRONT, INPUT); 59// delay(100); 60} 61 62long int cpt = 0; 63 64void callback() 65{ 66 intFlag = true; 67 digitalWrite(13, digitalRead(13) ^ 1); 68} 69int count = 0; 70 71 72int ringRing; 73 74 75 76void loop() 77{ 78// while(millis()<10000) 79// { 80// count++; 81 82// ringRing = ' '; 83// if(Serial.available() > 0) { 84// ringRing = Serial.read(); 85// Serial.print("RINGRING: "+ringRing); 86// } 87// if(ringRing == 122) { 88// readData(); 89// } 90 91readData(); 92 93 94 95//} 96//Serial.print("COUNT: "); 97//Serial.print(count); 98} 99 100void readData() 101{ 102 103 delay(20); 104 int left = getDistance(tpLEFT, epLEFT); 105 int right = getDistance(tpRIGHT, epRIGHT); 106 int front = getDistance(tpFRONT, epFRONT); 107 int back = getDistance(tpBACK, epBACK); 108 int threshold = 50; 109 Serial.print(" st "); 110 if (left < threshold && left != 0) 111 { 112 Serial.print(" left "); 113 } 114 if (right < threshold && right != 0) 115 { 116 Serial.print(" right "); 117 } 118 if (front < 10 && front != 0) 119 { 120 Serial.print(" front "); 121 } 122 if (back < threshold && back != 0) 123 { 124 Serial.print(" back "); 125 } 126 Serial.print("et "); 127 128 while (!intFlag); 129 intFlag = false; 130 uint8_t Buf[14]; 131 I2Cread(0x68, 0x3B, 14, Buf); 132 //acc 133 int16_t ax = -(Buf[0] << 8 | Buf[1]); 134 int16_t ay = -(Buf[2] << 8 | Buf[3]); 135 int16_t az = Buf[4] << 8 | Buf[5]; 136 // gyr 137 int16_t gx = -(Buf[8] << 8 | Buf[9]); 138 int16_t gy = -(Buf[10] << 8 | Buf[11]); 139 int16_t gz = Buf[12] << 8 | Buf[13]; 140 // acc 141 Serial.print(ax, DEC); 142 Serial.print(" "); 143 Serial.print(ay, DEC); 144 Serial.print(" "); 145 Serial.print(az, DEC); 146 Serial.print(" ea "); 147 148 // gyr 149 Serial.print(gx, DEC); 150 Serial.print(" "); 151 152 Serial.print(gy, DEC); 153 Serial.print(" "); 154 155 Serial.print(gz, DEC); 156 Serial.print(" END"); 157 158 uint8_t ST1; 159 do 160 { 161 I2Cread(0x0C, 0x02, 1, &ST1); 162 } 163 while (!(ST1 & 0x01)); 164 Serial.println(); 165} 166int getDistance(int trigPin, int echoPin) 167{ 168 long duration, distance; 169 digitalWrite(trigPin, HIGH); 170 delayMicroseconds(10); 171 digitalWrite(trigPin, LOW); 172 173 duration = pulseIn(echoPin, HIGH, 20000); 174 if (duration == 0) 175 { 176 pinMode(echoPin, OUTPUT); 177 digitalWrite(echoPin, LOW); 178 delayMicroseconds(200); 179 pinMode(echoPin, INPUT); 180 } 181 distance = (duration / 2) / 29.1; 182 return distance; 183} 184 185 186
Downloadable files
Sensor Network
Sensor Network
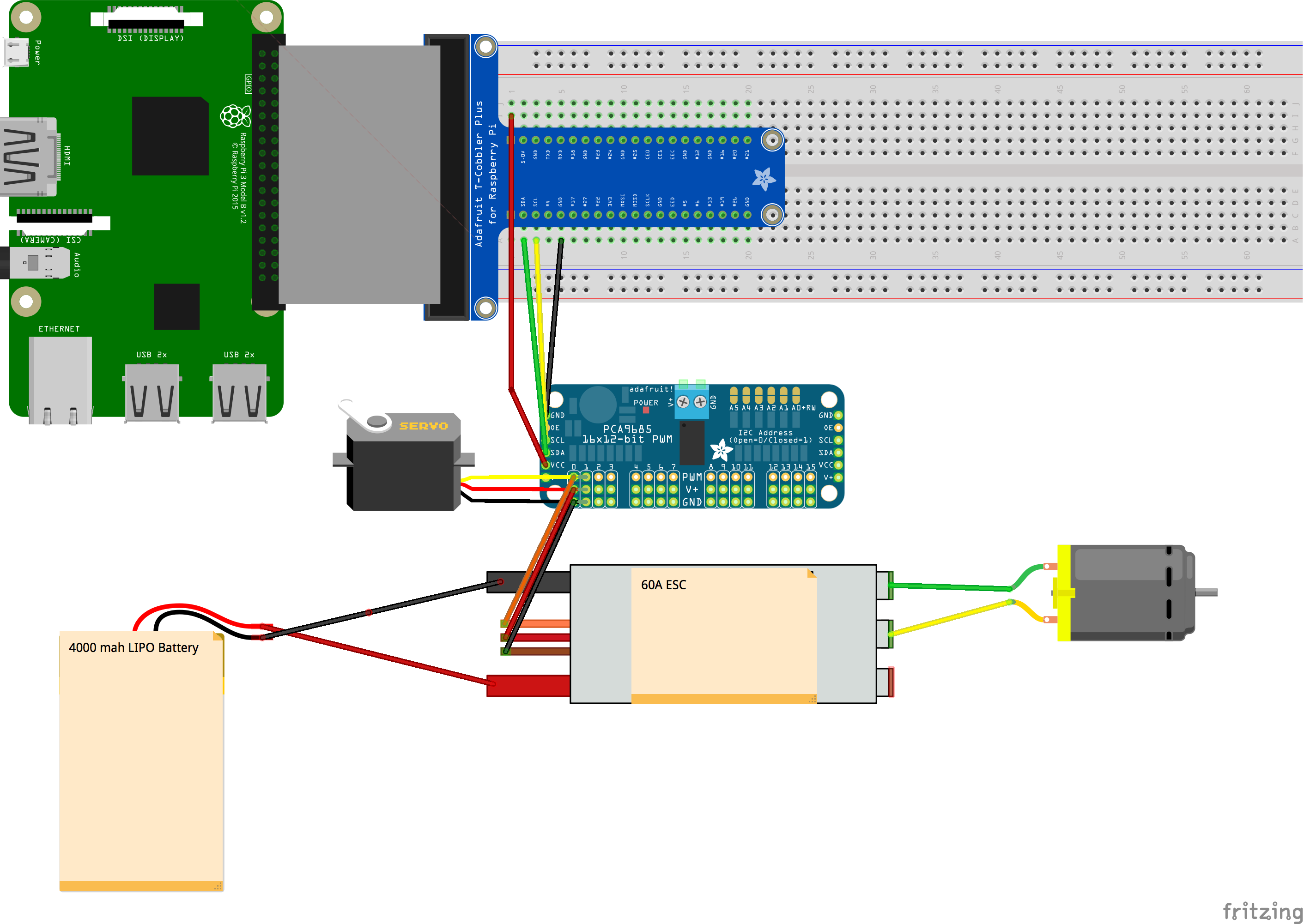
Engine Network
Engine Network
Sensor Network
Sensor Network
Engine Network
Engine Network
Vision Network
Vision Network

Documentation
Upper-Body
Upper-Body
Upper-Body
Upper-Body
Comments
Only logged in users can leave comments
dantuluri
0 Followers
•0 Projects
Table of contents
Intro
18
0