YolkaBot
YolkaBot - Cheap'n'simple telepresence bot with Arduino, any win/linux laptop and cross-platform remote control apps.

Components and supplies
DC motor (generic)
Arduino Leonardo
Dual H-Bridge motor drivers L298
Jumper wires (generic)
Apps and platforms
Visual Studio 2015
Arduino IDE
Project description
Code
Github
https://github.com/Rast1234/YolkaBot






Github
https://github.com/Rast1234/YolkaBot
Downloadable files
H-Bridge with L298N.fzpz
Custom L298N Fritzig part
H-Bridge with L298N.fzpz
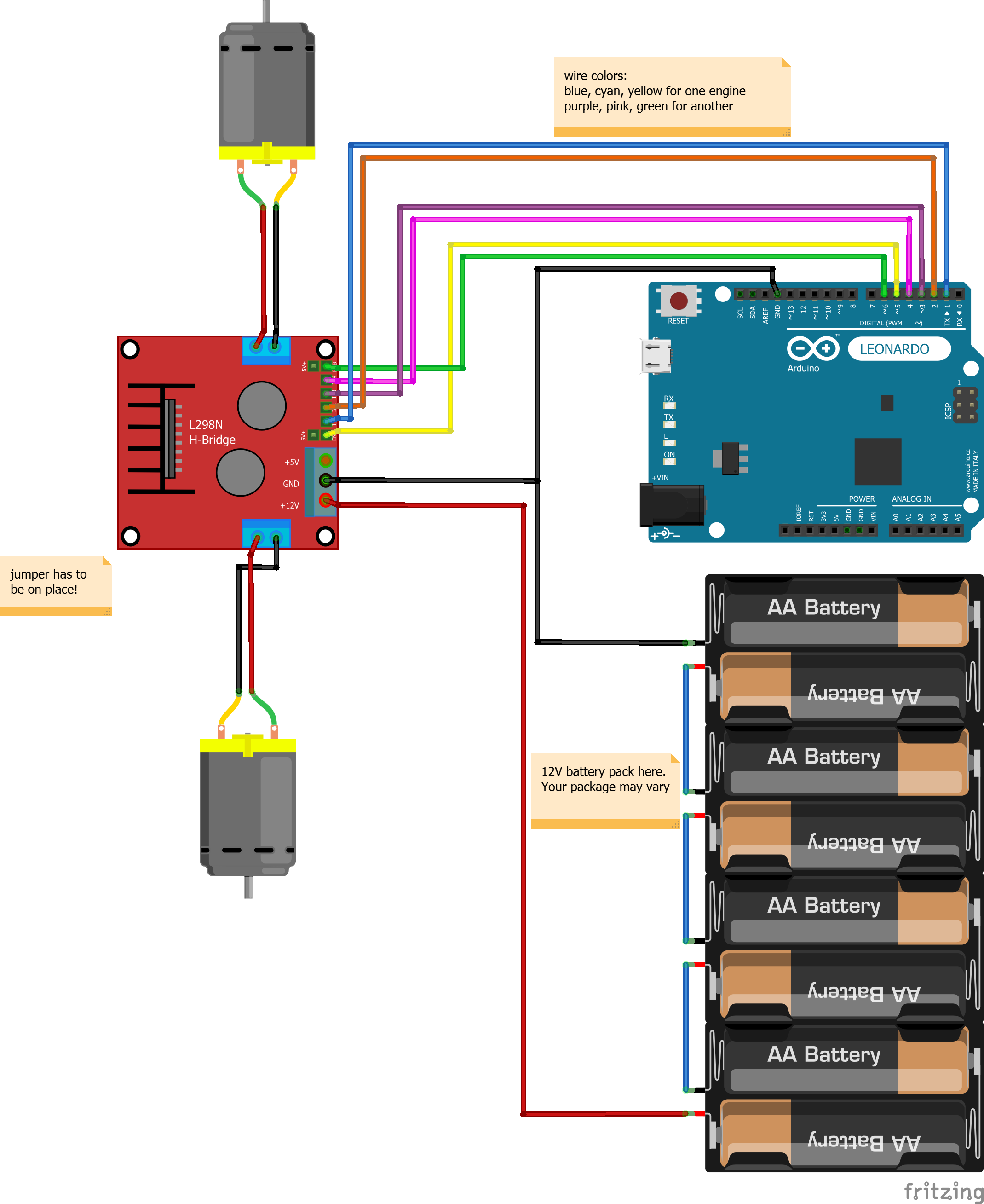
Fritzig scheme
May not open without "H-Bridge with L298N.fzpz"
Fritzig scheme
Fritzig scheme
May not open without "H-Bridge with L298N.fzpz"
Fritzig scheme
H-Bridge with L298N.fzpz
Custom L298N Fritzig part
H-Bridge with L298N.fzpz
Fritzig scheme image
If the .fzz fails for you
Fritzig scheme image
Comments
Only logged in users can leave comments
rast1234
0 Followers
•0 Projects
+1
Work attribution
Table of contents
Intro
1
0